
The Kion Group and its partners LeddarTech, Karlsruhe Institute of Technology (KIT) and the STARS Lab at the University of Toronto have started research project ARIBIC. The acronym stands for “Artificial Intelligence-Based Indoor Cartography”.
The project is based on the idea that continuous data evaluation will make it possible to create a real-time digital twin of a warehouse or production environment.
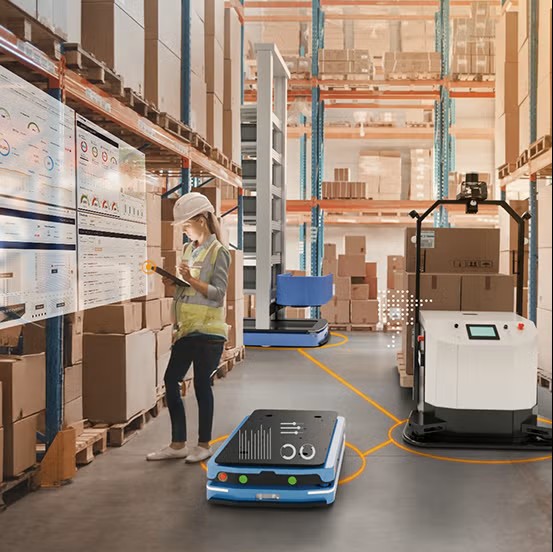
Automated guided vehicles are already being used on a large scale in warehouses and production facilities. With modern sensor technology such as laser scanners and cameras, they find their way safely through racks, production lines, and warehouses. In the process, they generate a considerable amount of data about the environment in which they move.
However, this data is usually not yet systematically processed and lies unused. What if the full potential of these bits and bytes could be exploited?
Creating a digital twin
The data generated by the sensor system is sent to the vehicle, processed there, and sent to the ARIBIC cloud platform. The sensor data is then processed further in the cloud.
The user receives live information about object locations via tracking & tracing. This information makes it possible, for example, to simulate the routes of vehicles and thus optimize processes in the warehouse and production.
“The data collected by the sensors on the vehicles are used to create high-quality, high-resolution 3D maps of warehouses or production facilities. The objective is to create a digital twin of the environment, thus enabling relevant information to be displayed and shared in real time,” said Henry Puhl, chief technology officer of the Kion Group.
At the same time, intelligent digital services offer the advantage that anomalies such as a blocked route are detected and reported. The consistent evaluation of the data will lead to a warehouse’s entire structure being optimized and adapted.
“Today, many industrial companies apply so-called post-digitization of their production environments and warehouses. However, this only captures a snapshot. The research results of the ARIBIC project go further by enabling continuous data evaluation,” added Joachim Tödter, senior director technology and innovation at the Kion Group.
Project partner LeddarTech
The idea for the research project originated in the summer of 2019 in the Technology & Innovation department of Kion Group.
LeddarTech, a Quebec-based specialist in environmental sensing solutions for autonomous vehicles and advanced driver assistance systems was recruited as a partner. It will be working primarily on the sensor system, which employs the company’s technological expertise in sensing, perception, and sensor fusion for mobility applications.
“When KION approached us and explained their vision for ARIBIC, it was clear from the beginning that we had to be part of this project,” said LeddarTech’s chief technology officer, Pierre Olivier.
“Not only does it allow us to collaborate with an industry leader as well as with two renowned labs, it also represents a perfect opportunity to leverage LeddarTech’s strong expertise in sensing, in integrating sensing platforms on vehicles, and in maximizing the potential from the available sensor data.”
Cooperation between industry and science
Research partners are the Karlsruhe Institute of Technology (KIT) and the STARS Lab at the University of Toronto, both leading institutes in artificial intelligence and robotics. As part of the ARIBIC project, the STARS Lab will develop methods to extract detailed semantic information (object labels) from large 3D maps of warehouse environments.
“ARIBIC is a perfect project for us to collaborate on current research topics with international partners and to establish new industry relationships”, said Jonathan Kelly, head of the STARS Lab.
The Department of Robotics and Interactive Systems of the Institute of Materials Handling and Logistics Systems (IFL) at the KIT researches future-oriented robotics solutions with practical benefits for its users. Researchers there focus on mapping and localization of mobile robots, computer vision, automated grasping and placing of various articles, and the development of intuitive human-machine interaction.
Within the ARIBIC Project the IFL focuses on the detection of intralogistics elements in 3D sensor data, as well as the merging of maps in multi-robot scenarios.
“We are very much looking forward to the opportunity for international cooperation”, said Kai Furmans, head of IFL.
The Kion Group is hoping that the project will enhance its already existing digital twin technology. “ARIBIC provides important progress in adding computational perception capabilities. Those leverage edge intelligence and open the door to many applications ranging from more efficient design of flexible automation and mobile robotic operations for the warehouse of tomorrow to inspection and detection of warehouse material placement and distribution that is critical to workflow optimization for many logistics operations,” said Hamid Montazeri, senior vice-president, software and digital solutions development at Kion subsidiary Dematic.
The project was approved at the beginning of 2021 by the National Research Council of Canada Industrial Research Assistance Program (NRC IRAP) and the German Federal Ministry for Economic Affairs and Energy (BMWi), which are also providing funding. The project is scheduled for completion in the fourth quarter of 2023.




Leave a Reply